Research & Development
Drones In Archaeology
Integrated Data Capture, Processing, and Dissemination in the al-Ula Valley, Saudi Arabia
Published in 2014, by Neil G. Smith, Luca Passone, Said al-Said, Mohamed al-Farhan, and Thomas E. Levy
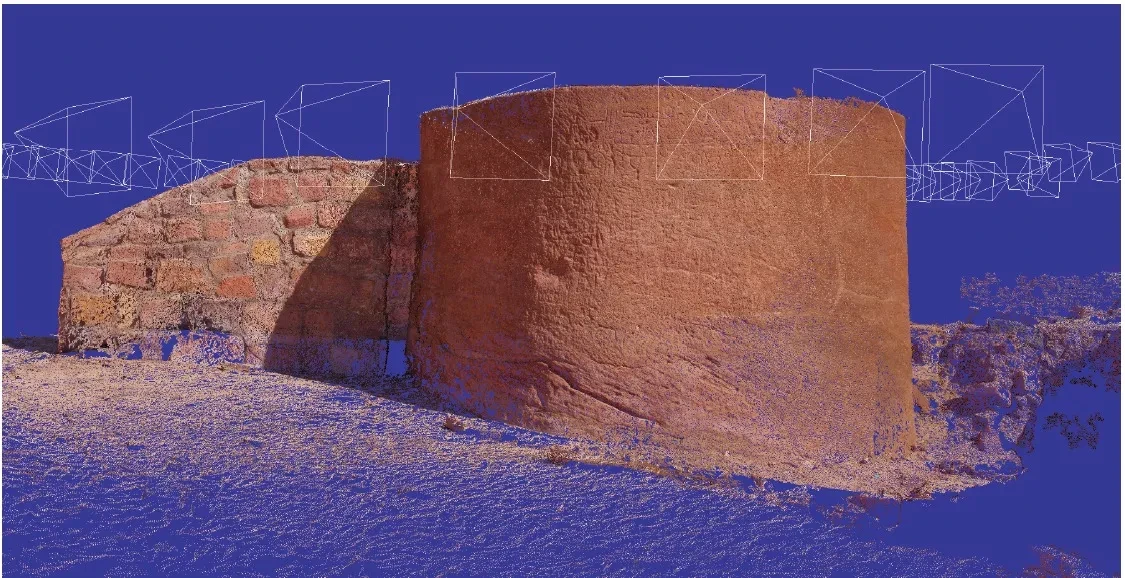
In late 2013, a joint archaeological and computer vision project was initiated to digitally
capture archaeological remains in the al-Ula Valley, Saudi Arabia. The goal of the team of
archeologists and computer scientists was to integrate 3D scanning technologies to produce
3D reconstructions of archaeological sites. Unmanned Aerial Vehicles (UAVs) served as the
vehicle which made this scanning possible.
UAVs allowed the acquisition of 3D data as easily from the air as from the ground. This project
focused on the recent excavations carried out in ancient Dedan by King Saud University and the
country’s conservation of the Lihyanite “lion tombs” carved into the ancient city’s cliff faces.
Over the next several years this site will be used as a test bed to validate the potential of
this emerging technology for rapid cultural heritage documentation.
Additionally, several areas were scanned in Mada’in Saleh, an ancient Nabatean city
filled with monumental carved sandstone tomb facades, rivaled only by the capital of the Nabatean
empire: Petra.
Paper link

Superpixel-based Convolutional Neural Network for Georeferencing the Drone Images
Published in 2021 by Shihang Feng, Luca Passone and Gerard T. Schuster
Information extracted from aerial photographs has been used for many practical
applications such as urban planning, forest management, disaster relief, and
climate modeling. In many cases, the labeling of information in aerial photos
is still performed by human experts, resulting in a slow, costly, and error-prone
process. This paper shows how a convolutional neural network can be used to
determine the location of GCPs in aerial photos, which significantly reduces
the amount of human labor in identifying GCP locations.
Two CNN methods, sliding-window CNN with superpixel-level majority voting
and superpixel-based CNN, are evaluated and analyzed. The results of the classification
and segmentation show that both methods can quickly extract the locations of objects
from aerial photographs, but only superpixel-based CNN can unambiguously locate the GCPs.
Paper link
Aerial Path Planning for Urban Scene Reconstruction: A Continuous Optimization Method and Benchmark
Small unmanned aerial vehicles (UAVs) are ideal capturing devices for high-resolution
urban 3D reconstructions using multi-view stereo. Nevertheless, practical considerations,
such as safety, usually limit access to the scan target to a short period of time,
especially in urban environments.
Therefore, it becomes crucial to perform
both view and path planning to minimize flight time while ensuring complete and accurate
reconstructions. In this work, we address the challenge of automatic view and path
planning for UAV-based aerial imaging with the goal of urban reconstruction from
multiview stereo.
Paper link
Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications
We present a photo-realistic training and evaluation simulator (Sim4CV)
(http://www.sim4cv.org)
with extensive applications across various fields of computer vision.
Built on top of Unreal Engine, the simulator integrates full-featured
physics-based cars, unmanned aerial vehicles (UAVs), and animated human
actors in diverse urban and suburban 3D environments. We demonstrate the
versatility of the simulator with two case studies: autonomous UAV-based
tracking of moving objects and autonomous driving using supervised learning.
The simulator fully integrates several state-of-the-art tracking
algorithms with a benchmark evaluation tool and a deep neural network
architecture for training vehicles to drive autonomously. It generates
synthetic photorealistic datasets with automatic ground truth annotations
to easily extend existing real-world datasets and provides extensive
synthetic data variety through its ability to reconfigure synthetic
worlds on the fly using an automatic world generation tool.
Applications Developed in Sim4CV


Teaching UAVs to Race (AI)
Recent work has tackled the problem of autonomous navigation by
imitating a teacher and learning an end-to-end policy, which
directly predicts controls from raw images. However, these
approaches tend to be sensitive to mistakes by the teacher
and do not scale well to other environments or vehicles. To
this end, we propose a modular network architecture that
decouples perception from control. This modular network
architecture is trained using Observational Imitation Learning (OIL),
a novel imitation learning variant that supports online training
and automatic selection of optimal behavior from observing multiple
teachers.
We apply our proposed methodology to the challenging problem of
unmanned aerial vehicle (UAV) racing. We develop a simulator that
enables the generation of large amounts of synthetic training data
(both UAV-captured images and its controls) and allows for online
learning and evaluation. We train a perception network to predict
waypoints from raw image data and a control network to predict UAV
controls from these waypoints using OIL. Our modular network is able
to autonomously fly a UAV through challenging racetracks at high
speeds.
Extensive experiments demonstrate that our trained network outperforms
its teachers, end-to-end baselines, and even human pilots in simulation.

BVLOS Drone Operation On 5G Network
A platform that allows users to control drones remotely through a mobile application running on 5G network.
Functional Requirements
- Allow the user to create a new account.
- Allow the user to sign into their account.
- The system assigns the available drone to the user.
- The user takes control over the selected drone.
- The system enables the user to send control commands to the associated drone.
- The user starts moving the drone as desired.
- The camera starts live streaming the drone footage back to the user.
Patents
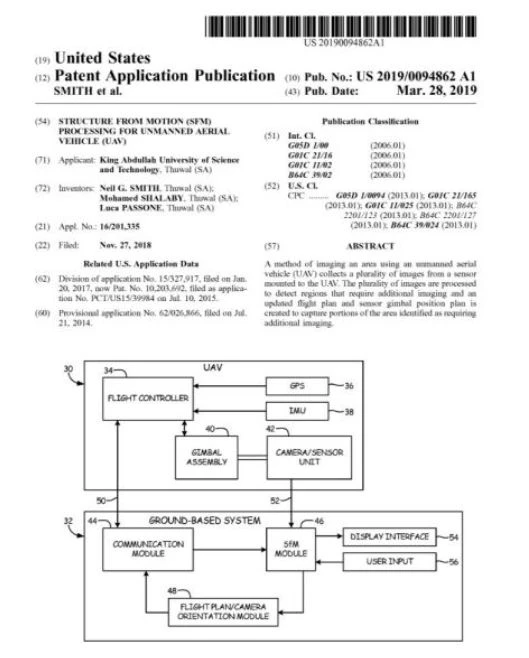
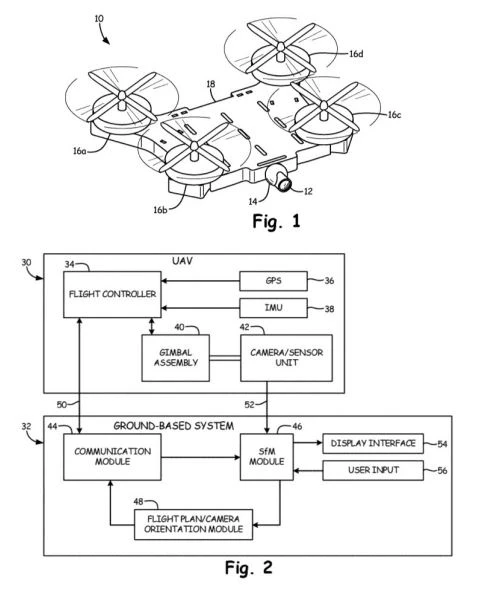
U.S. Patent Application No. 16/201,335
STRUCTURE FROM MOTION (SfM) PROCESSING FOR UNMANNED AERIAL VEHICLE (UAV)
Publication No.: 2019-0094862 Publication Date: March 28, 2019.